活体线虫秀丽隐杆线虫(C.elegans)与人类的基因相似度约为60%。已经研究了这种相似性以开发针对年龄引起的疾病的疗法,例如阿尔茨海默氏病和肌萎缩侧索硬化症。然而,研究这些蠕虫的研究需要取得进展,以揭示运动能力与感觉神经元之间的关系。
汉阳大学的研究人员已经展示了使用磁性形状可重构微拓扑结构的物理引导的蠕虫多模态运动。他们的研究最近登上了AdvancedScience的头版。
这项发表在AdvancedScience上的研究是第一个根据蠕虫微地形环境的变化选择性地显示线虫运动模式的研究,也是表明利用线虫作为亚毫米尺度的可能性的首要研究生物机器人。biobot是bio和bot(机器人)的结合词,意指人类可以控制非人类生物的行为。
传统的机器人通过使用电池和通过软件复杂编程的电路来工作。然而,活虫通过感知周围环境来移动。使用位于其头部、身体和尾部的感觉神经元,蠕虫以复杂的曲线运动做出反应,而无需植入任何额外的装置。
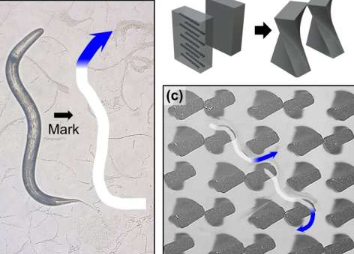
例如,C.elegans在无障碍室内进行正弦游泳。然而,在具有矩形微屏障的地形中,蠕虫通过其神经元对屏障进行机械感应来线性移动。随着这种线性平移,秀丽隐杆线虫会寻找有利于其蛇形弯曲身体的路径。研究人员将此命名为导航运动,在矩形微屏障之间通过。
这项工作的一个独特之处在于,由铁颗粒和弹性聚合物组成的微屏障可以随着磁通量密度的增加而改变其形态。C.elegans感知屏障间距和微屏障高度的变化,并将运动模式从导航运动转换为规避运动或攀爬。
值得注意的是,研究人员已经证明了秀丽隐杆线虫的运动选择性。biobot在扭曲和成对的微屏障处显示规避运动,而在扭曲和弯曲的微屏障处出现攀爬。这两种类型分别被认为是迷宫状和阶梯状微地形。
对于迷宫般的地形,扭曲和成对的微屏障为秀丽隐杆线虫提供了屏障基底之间的狭窄间隙。由于此间隙比秀丽隐杆线虫的头长和体宽窄,因此蠕虫无法通过并绕过此微地形中的路径。在阶梯状地形的情况下,扭曲和弯曲的微屏障充当线虫攀爬的微步。有趣的是,随着微步的高度变得与秀丽隐杆线虫的头部长度相当,这种攀登变得更快。与本工作中报告的其他运动模式相比,攀爬和绕行运动的速度分别是最快的~0.46BLs-1和最慢的~0.09BLs-1。
此外,研究人员证明,这些多模态运动模式在头部、身体和尾部神经元中具有基因紊乱的野生型和突变株之间明显不同。值得注意的是,由于头/尾神经元突变,trp-4(sy695)菌株无法绕过微地形,而mec-4(e1339)菌株由于体神经元突变无法攀登微地形。
这项研究是关于蠕虫运动模式的第一份报告,该蠕虫的运动模式由磁性可重构微地形物理引导,而不是电刺激或化学处理。未来的研究将在计算模拟的帮助下扩展当前的研究结果,这将有助于建立用于治疗人类神经系统疾病的药物筛选平台。通过观察野生型和突变株的秀丽隐杆线虫是否执行运动模式并在药物治疗后恢复机械传感能力,可以确认正在开发的药物的功效。